






Self-Balancing Robot using balancewii
Building a self-balancing Building a self-balancing robot using the BalanceWii board is an interesting project. The BalanceWii is a hardware platform based on the Nintendo Wii Balance Board, which can be used for various applications, including robotics. Here’s a general outline of how you can approach this project:
Gather the Required Components:
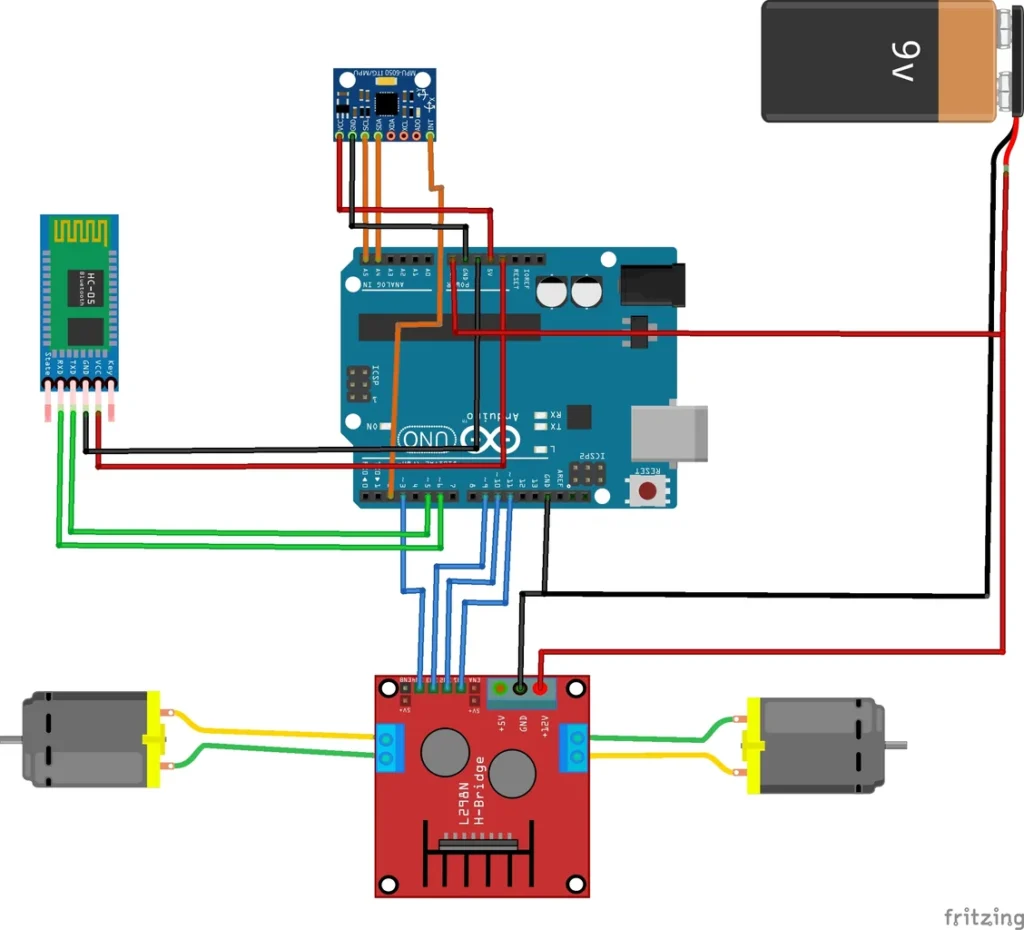
Besides the BalanceWii board, you’ll need additional components such as an Arduino microcontroller, motor drivers, motors, wheels, and a power source. Make sure you have all the necessary components and tools before proceeding.
Familiarize Yourself with the BalanceWii Board:
Understand the functionality and communication protocol of the BalanceWii board. It uses Bluetooth to transmit sensor data to a host device, such as an Arduino.
Set up Arduino Development Environment:
Install the Arduino IDE and configure it for your Arduino board. This will allow you to program the Arduino and interface it with the BalanceWii board.
Interface the BalanceWii Board with Arduino:
Connect the BalanceWii board to the Arduino using the appropriate wiring. This typically involves establishing a Bluetooth connection between the board and the Arduino to receive sensor data.
Sensor Data Processing:
Read the sensor data from the BalanceWii board using the The board provides tilt and pressure sensor readings that can be used to determine the robot’s orientation and balance.
Control Algorithm:
Implement a control algorithm to maintain the robot’s balance based on the sensor data. This typically involves using a feedback control mechanism, such as a PID (Proportional-Integral-Derivative) controller, to adjust the motor speeds and keep the robot
Motor Control:
Use the motor drivers and motors to control the movement of the Adjust the motor speeds based on the output of the control algorithm to maintain balance and achieve desired motion.
Test and Fine-Tune:
Conduct initial tests to verify the robot’s balance and movement. Observe its behavior and make adjustments to the control algorithm parameters as needed to improve performance.
Enclosure and Design:
Design and build a suitable enclosure for the robot to house the components securely. Consider factors such as weight distribution, stability, and protection of the electronics.
Iterative Development:
Continuously refine and improve your robot’s performance by fine-tuning the control algorithm, making mechanical adjustments, and incorporating additional features like wireless control or obstacle detection.
Remember to refer to the documentation and resources provided with the BalanceWii board for specific instructions and examples. Additionally, there are online communities and forums where you can find valuable insights and support from others who have worked on similar projects.